Up to Summit
After threats of a 6:30 am flight, we relaxed a little bit when we got word that the Hercules would arrive around 10:30. The whole team headed out to the transition to test the tow rig for the fuel bladders they're hauling on the traverse. Apparently the skis supporting the tow rig had some issues that would take a day or two to resolve. At that point, we heard that our plane could be delayed for a day or maybe two, who really knows? Kevin and I tried to fight our drive to escape the toast and mashed potatoes that have been sustaining us here, and headed back to while away the hours on the interweb and take a crack at final cut pro for video editing.
After a couple hours, we heard news that the C-130 was indeed on its way and would land in several minutes. We ran to grab the last of our gear from our hangar space. As we saw Yeti for the last time, Kevin and I chose the good cop/bad cop approach to behavior shaping. Yeti is easily anthropomorphized since it's behavior can't always be explained. Jim hopes to run it for a few good short data runs, then run it until it into the ground.
C-130 Landing

We waited on the Tarmac while the crew removed the Jet Assisted Take Off units from the back of the plane. We then loaded into webbing benches strapped to the wall and stuffed in earplugs. The Herc flew south for a while before heading east inland towards summit. The sea ice stretched as far as we could see. We're intrigued by the possibility of hydroplaning a snowmobile from ice berg to berg, but that'll have to wait until our next trip up here.


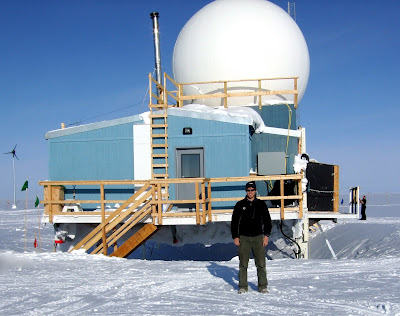
Unloading at Summit

Our experience at the Summit consisted of running to find the 'pee flag,' then standing in prop-wash for 45 min as the plane unloaded fuel for the camp. We were happy to get back to Kanger, though apparently nobody figured out that we were supposed to eat. We got a couple of dehydrated meals from the crew here and headed back to our dorms in the science support building to boil some water and enjoy some subsidized scotch. Kevin and I are realizing our four days here could be pretty busy with writing, but we're planning to take a day and sleep in tomorrow.
Fuel bladders on sleds ready to go

posted by Eric Trautmann @ 10:48 PM
4 Comments
![]()
![]()