Signal Processing, Power Bus and Power Board
 The signal processing board, as you can see above in it's not-so-finished state, is in the process of being designed using Eagle Layout Editor... The yellow lines you can see up there are all the connections that need to be made between each of the little red resistor and op-amp chips and green headers...It's called a 'rat's nest' for a reason. Anyways, the board is currently in a much-more-finished state as you can see below:
The signal processing board, as you can see above in it's not-so-finished state, is in the process of being designed using Eagle Layout Editor... The yellow lines you can see up there are all the connections that need to be made between each of the little red resistor and op-amp chips and green headers...It's called a 'rat's nest' for a reason. Anyways, the board is currently in a much-more-finished state as you can see below:
The job of the signal processing board is to take the raw output signals of the sensors, temperature, humidity, incline, as well as the motor controller output (in current and voltage for velocity and torque) and process them such that the computer can make out the position and status of the robot. Additionally, the computer's D/A output is run through the board to filter it before it goes back to the motor controllers.
Eagle is sweet. It is about 40000000 x 10 ^ inf times cooler than Cadence...Though the tool panel on the side is a bit weird and scrolling is entirely counter-intuitive and the library indexing system sucks, it is incredible to be able to drag the parts around the board and have it recalculate the shortest paths for common signals for you...totally sweet.
If all goes well, we should be able to order the board by Friday. Once the board has been ordered, time will ramp up again on the power board (which changes the battery voltage and current into smaller voltages for use by the computer, radio, gps, radar, sensors, sig processing board, etc.) The power board will be a CNCed two-sided copper-board, machined entirely hopefully over the course of a half hour...woohoo!...using a design in SolidWorks...wow! Thanks Pete Fontain! It's all designed and ready to go into SolidWorks...which, by the way, is the best program ever...it's a happier, friendlier world than Pro/E. I highly recommend the experience...I once wrote a paper about the CAD experience and the creation of the universe in a class on Jewish Mysticism...yay liberal arts...
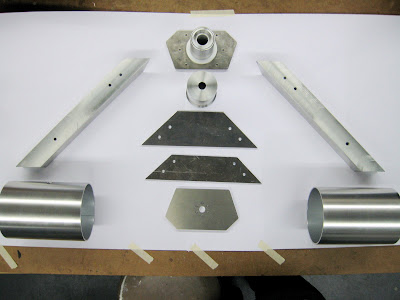
Anyways, the power bus is also designed...We're going to use screw terminal blocks to secure the battery series packs in place. We were a bit worried about adding in a heat sink for the power diodes, but we had the sweet idea of using the copper bus block itself as the heat sink, since the case of the diode works as the terminal just like the pin out. It should simplify the design since the terminal blocks won't have to be machined out anymore...It will be pretty simple really. Fuse holders still need to be ordered, however...Once the funding switch gets turned back on that order will go out ASAP.
So that's about it with electrical stuff. Electronic stuff is going better I'm told...Yay for debugging the GPS...
posted by Gus Niles @ 2:31 AM
1 Comments
![]()
![]()