Final Preparations
After making Yeti work pretty well, all of a sudden there are a bunch of other things to do. Jim has developed a datalogger system for the large fuel bladder sleds that will record a temperature profile from the bottom of the sled using 46 thermocouples and a huge mess of wires. We spent the day out at the traverse staging area installing the thermocouples while the rest of the team sorted food into the refrigerator container sled. I would have thought that since we're in Antarctica and it never gets above freezing that the traverse would not need a dedicated walk-in freezer the size of a whole living module, but apparently the sun heats everything up enough that they do. Instead of circulating the sub-zero air from outside, it operates as a standard freezer, which is a little absurd but comes pre-built, and thus makes sense...sort of.

This is the living module that will house eight crew members. The insides are actually very nice with ample space and a comfortable kitchen and lounge. There's not a ton of privacy, but significantly more space than a naval ship.
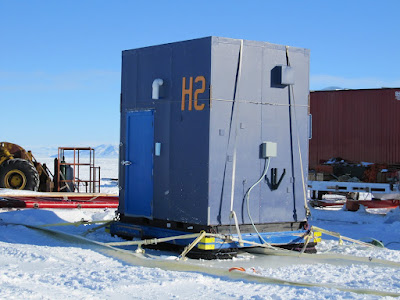
Jim and I, if we're lucky, will be living in the H2 module. This guy has two bunks at the top, and living space below. It's sort of like sharing a tall cubicle with someone for a week, though remarkably comfortable and well designed.

While we were out in the staging area, I had an excellent view of Mt. Erebus outgassing behind McMurdo. Erebus is an active volcano, and has active fumoroles and lava pits on top, but I haven't been able to see the smoke before today. Apparently this is one place where a lot of volcanologists with no direct interest in Antarctica come to do research, since it's one of the few volcanoes in the world that's continuously active.

On the way back from the traverse staging area, I was lucky enough to catch a team of French scientists launching a high-altitude research balloon. The launch operations are very involved and elaborate. I unfortunately have no clue what they're actually doing, but I'll try to find this out.
We met another group a few days ago doing interesting robotics work out of McMurdo. This group has developed a robot named SCINI (skinny), which is an underwater ROV designed to fit down an 8" drilled hole in the ice. It's operated on the end of a tether, and has a number of cameras and a gripper. They're using it to look at the results of 40-year growth experiments that have been sitting on the bottom of the ocean floor since the 70's.
These guys had to deal with an additional operational issue that we have yet to deal with on the Yeti project. They're operating in a small shack over a drilled hole in the ice from which they pilot the ROV. A local seal has decided that it likes them, and will frequently come up the hole in the ice and into the shack to hang out. It signals that it wants to play with them by blowing bubbles in the water, and blowing air and water at them. They thought this was awesome the first time, but after encountering this fellow many times, his habit of sneezing mucus all over them is apparently not as funny as it used to be. Bob described it as 'lung butter,' which sounded like something that shouldn't get sprayed on computers.

The SCINI robot is really cleverly designed to fit down small holes in the ice an carry a number of different payloads to support different science missions.

The team let us try driving it around. They control SCINI with a wireless playstation controller which is a lot slicker than Yeti's 'toolstation.'
We had some more successful runs of Yeti down by the ice pier, and seem to be holding sub-meter tolerances to GPS waypoints. The controller could use some tweaking and some integral control. At the moment, when Yeti hits a waypoint, it turns towards the next one but makes a sweeping arc to get there. Since we need forward motion to estimate bearing using successive GPS points (we can't use a magnetometer since magnetic bearing doesn't work near the poles), I don't have a closed-loop way of reorienting Yeti towards the next waypoint. The result is that we can hit all the waypoints but don't hold a tight path between them. I'm working on a quick hack of a solution to have Yeti spin at a given rate for a given period of time, which will probably get us most of the way there and isn't really rocket science.
posted by Eric Trautmann @ 10:02 AM
0 Comments
![]()
![]()

0 Comments:
Post a Comment
Subscribe to Post Comments [Atom]
<< Home