We began fabricating the chassis with prodigious speed last week. The beginning of this week we'll be working on setting up the weld fixturing, and we'll hopefully be ready to weld the chassis by early next week. After an afternoon of scavenger hunting across campus, following rumors, tips, and people's vague recollections, we tracked down a guy named Inky, who we've heard is the best welder around. We had a brief chat with him in the FO&M shop, and it sounds like he knows a lot more than we do about heliarc welding so we're hoping he'll help us out.
One of the most significant lessons we've learned is the degree to which Murphy's law holds true. I won't bore you with the details, but dealing with a project this size make me appreciate how absurdly difficult it must have been to land a man on the moon.
Leonard Parker, our relentlessly heckling machine shop guru, has taken a serious interest in our project and has helped us out immensely. He's become interested in seeing the project succeed and has saved us with freakishly timely assistance, saving us from ourselves and supplementing experience for improvisation. Without him on board it's hard to see how we'd be able to finish on time with a well-constructed robot.
Leonard

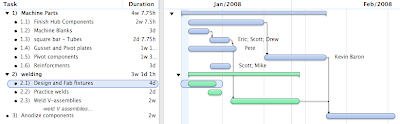
We began fabrication last week by milling the gusset plates that are welded to the square tubing on both sides of the chassis. All of the main chassis components have welds somewhere on them, so we decided to use marine grade 5086 aluminum. This alloy combines decent yield strength with weldability and machineability. We were concerned about using 6061 since our robot will be deployed in temperatures cold enough to make the aluminum more brittle. The 6061 also loses much of its strength after welding, so we paid a little more and made the upgrade.
We spent many hours in the shop this past week just machining piece blanks from larger stock material. The motor housings were designed with 1/8" walls but we could only find 1/4", which means that each piece has to be laboriously turned down for three and a half hours on the lathe. It's a good thing we have a couple team members to tap each other out. We've found that there is a limited number of 25-minute lathe cuts one can perform before you want to clamp the chuck down on your head.
Our square-bar stock was .3 inches too short (from a 5-foot piece) so we were forced to order another segment. When that arrives tomorrow, we'll begin machining our chassis tubes and will be closer to getting everything welded.
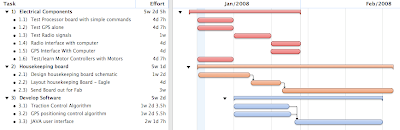
We'll update on the electrical and control side of stuff tomorrow or tuesday.